-

- Ground Phenotyping rover designed by graduate students.
-

- (cred: Randy Boman)

-

- Dr. Thomasson collecting field data for UAV research.
-

- Phenotyping Unmanned Ground Vehicle used for collecting phenotyping data for corn and sorghum.
-

- Simulation: Harvest operation involving the cooperation between a grain cart and a combine
-

- Construction of the Micro Gin at Hobgood
-

- Ground based multispectral image collection in the nitrogen management cotton plants
-

- From left to right: seed cotton from the field, cotton seed from the gin, cotton lint from the gin, and harmful plastic that has to be removed from the cotton for quality purposes.
-

- Students in the field
-

- Mass flow sensors located on a cotton stripper
-

- Graduate student Pappu Yadav, collecting aerial data using DJI Matrice 100 quadcopter at the TAMU Farm
-

- Cotton stripper used with a onboard weight-based calibration system
-

- Cotton Weighing trailer, cotton module builder and cotton boll buggy ready by the cotton field. Lubbock, TX
-

- Graduate Student, Hussein Gharakhani, 3D printing an End-Effector housing and comparing the printed dimensions with the actual amounts
-

- Work station to hand sift through ginned cotton to determine how much plastic remains after ginning.
-

- Newly installed Module Feeder system, which allows us to test plastic contamination at the feeder rollers.

-
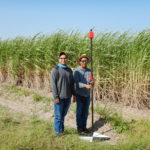
- Graduate students conducting Ground Control Points (GCPs) survey with post-processed kinematic (PPK) V-map Air Model GPS system
-

- Energy cane imagery collection using DJI Matrice 100 platform with SlantRange 3p sensor

